














Filter by
Mount Type

Mounting Location
For Robot Arm Manufacturer Series
For Robot Arm Manufacturer
System of Measurement
Material
Robot Cell Component

Input Voltage
For Robot Arm Manufacturer Model Number
Length
Bolt Hole Thread Pitch
Current
DFARS Specialty Metals
Electrical Connection Component
Enclosure Rating
Export Control Classification Number (ECCN)
Load Capacity
REACH
RoHS
Sensor Type
Flammability Rating
Contact-Sensing Robot Safety Padding
 |
 |
Cover robot arms and tools with this padding to help prevent injuries in areas where people are working nearby. When the padding is touched, pressure sensors signal your machine to stop moving, halting it within nine milliseconds. If a collision takes place, the soft polyurethane foam will lessen the impact. With this padding installed, you can operate robots closer to people and at higher speeds than with other safety equipment, such as machine guards. You can also combine it with other equipment to create multi-step safety systems.
Each pad has LEDs that change color to indicate their status. When the lights are blue, the padding is fully operational. Pads that sense a pressure change turn red and the surrounding pads turn yellow, clearly showing the impact area. They're powered by internal micropumps, so you don't need an outside compressed air source. The double circuit design makes sure that if one circuit fails, the other will continue to function.
All components meet international design standards for safety. Using this padding helps you meet ISO/TS 15066 standards for safe interactions between humans and robots. Before running robots, you should carry out a safety risk assessment as described in ANSI/RIA R15.06 to ensure a safe environment for those working near the robot.
Flanges
 |  | 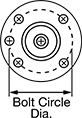 |
Flange senses pressure in any direction through the robot tool as well as direct contact with the flange itself. | Flange |
Flanges are compatible with most robot tools and accessories, so you can switch out different tools without needing custom-fit padding for each one. However, flanges are not as sensitive as custom-fit padding, and they extend the length of your robot arm. They come with a controller, cords, and adapters that match several common mounting patterns. If you don't see your robot model number listed, measure the bolt circle diameter to determine mounting compatibility.
Robot Tool and End of Robot Arm | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
For Robot Arm Manufacturer (Series/Model No.) | Mount Type | Bolt Circle Dia. (Mounting Hole Pattern Compatibility) | Bolts Included | Sensor Response Time, ms | Max. Load Cap., kg | Wt. | Includes | Specs. Met | Certification | Each | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Polyurethane Foam | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| ABB (IRB 360 For 6/1600, For 8/1130; IRB 120, IRB 140, IRB 1200, IRB 1410, IRB 1600, IRB 2400, IRB 2600) FANUC (CR 4iA, 7iA; CRX 5iA, 10iA, 10iA/L, 20iA/L, 25iA; LR Mate 200iD/7L; M-20 iA) KUKA Robotics (KR 10 R1100-2) Omron (TM 5, 12, 14) Precise Automation (PAVP6, PF3400, PP100) Productive Robotics (OB7) Staubli (TX2 90) Universal Robots (UR3, UR3e, UR5, UR5e, UR10, UR10e, UR16, UR16e) Yaskawa Motoman (GP 7, 8; MH 3BM, 3F, 5LS II, 5S II; MPP 3H, 3S) | Bolt On | 31.5 mm (ISO 31.5) 40 mm (ISO 40) 50 mm (ISO 50) | Yes | 9 | 20 | 14.3 lb./ 6.5 kg | One Controller-to-Padding Cord (5 m Lg), One Padding-to-Padding Cord (400 mm Lg), Three Payload Springs, Three Robot-Side Flange Adapters, Three Tool-Side Flange Adapters, Safety Padding Controller, Safety Padding Flange | ISO/TS 15066, ISO 13849-1, IEC 62061 | TUV Rheinland Certified, C-TUV Rheinland Certified, CE Marked | 00000000 | 000000000 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
EachDelivers Wednesday  | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
